APLICACIONES DE LA PROGRAMACIÓN LINEAL
Los
modelos de Programación Lineal son ampliamente utilizados como herramienta de
apoyo a la toma de decisiones tanto por sus propiedades que facilitan su
resolución, como así también su pertinencia a distintos problemas de naturaleza
real. A continuación se presentan algunos ejemplos resumidos en complejidad con
el objetivo de mostrar algunas aplicaciones típicas.
Los modelos
de Programación Lineal son ampliamente utilizados como herramienta de apoyo a la
toma de decisiones tanto por sus propiedades que facilitan su resolución, como
así también su pertinencia a distintos problemas de naturaleza real. A
continuación se presentan algunos ejemplos resumidos en complejidad con el
objetivo de mostrar algunas aplicaciones típicas.
Problema de Inversión: Considere que usted dispone de un capital de
21.000 dólares para invertir en la bolsa de valores. Un amigo le recomienda 2
acciones que en el último tiempo han estado al alza: Acción A y Acción B. La
Acción A tiene una rentabilidad del 10% anual y la Acción B del 8% anual. Su
amigo le aconseja tener una cartera equilibrada y diversa y por tanto le
recomienda invertir un máximo de 13.000 dólares en la Acción A y como mínimo
6.000 dólares en la Acción B. Además la inversión en la Acción A debe ser menor
o igual que el doble de la inversión destinada a la Acción B. Usted quiere
formular y resolver un modelo de Programación Lineal que permita obtener la
política de inversión que permita obtener la máxima rentabilidad (interés)
anual.
Variables de Decisión:
x = dólares invertidos en Acción A.
y = dólares invertidos en Acción B.
x = dólares invertidos en Acción A.
y = dólares invertidos en Acción B.
Función Objetivo: Se busca maximizar la rentabilidad anual que
resulta de invertir en los 2 tipos de acciones.
Maximizar 0.1x + 0.08y
Maximizar 0.1x + 0.08y
|
x + y
≤ 21.000
|
Se puede invertir como máximo
21.000 dólares en total
|
|
x
≤
13.000
|
Invertir como máximo 13.000 dólares
en Acción
A
|
|
y ≥
6.000
|
Invertir como mínimo 6.000 dólares
en Acción B
|
|
x - 2y
≤
0
|
Inversión en A debe ser menor o
igual que el doble de la inversión en B
|
|
x≥0, y≥0
|
No
Negatividad
|
Sólución Óptima: X = 13.000 Y = 8.000. Valor Óptimo
V(P) = 1.940 dólares. Se recomienda verificar estos
resultados a través de la resolución gráfica y/o utilizando Solver de Excel.
Problema de Proceso
Productivo: Una empresa produce tres tipos de muebles (A, B y C), cada
uno de los cuales se vende a $200, $150 y $120 respectivamente. Para la
producción de estos muebles la empresa cuenta con 315 horas disponibles en un
taller de corte de madera, 110 horas disponibles en un taller de lijado y 50
horas en un taller de pintado. Se ha estimado que el mueble A requiere por
unidad 15 horas de trabajo en el taller de corte, 2 horas en el taller de
lijado y 1 hora en el taller de pintado (estos mismos valores para los muebles
B y C son 7,5:3:1 y 5:2:1, respectivamente). Se requiere formular y resolver un
modelo de Programación Lineal que permita encontrar la cantidad a elaborar y
vender de estos muebles de modo que la empresa obtenga el mayor beneficio.
Variables de Decisión:
X = Unidades a elaborar y vender del mueble A.
Y = Unidades a elaborar y vender del mueble B.
Z = Unidades a elaborar y vender del mueble C.
X = Unidades a elaborar y vender del mueble A.
Y = Unidades a elaborar y vender del mueble B.
Z = Unidades a elaborar y vender del mueble C.
De esta forma el modelo de
optimización que permite encontrar el plan óptimo de producción es el
siguiente:

Este es el modelo utilizado
para ejemplificar el uso de Solver de Excel en donde se pueden encontrar los
resultados.
Problema de Proceso
Productivo: Una empresa produce tres tipos de muebles (A, B y C), cada
uno de los cuales se vende a $200, $150 y $120 respectivamente. Para la
producción de estos muebles la empresa cuenta con 315 horas disponibles en un
taller de corte de madera, 110 horas disponibles en un taller de lijado y 50
horas en un taller de pintado. Se ha estimado que el mueble A requiere por
unidad 15 horas de trabajo en el taller de corte, 2 horas en el taller de
lijado y 1 hora en el taller de pintado (estos mismos valores para los muebles
B y C son 7,5:3:1 y 5:2:1, respectivamente). Se requiere formular y resolver un
modelo de Programación Lineal que permita encontrar la cantidad a elaborar y
vender de estos muebles de modo que la empresa obtenga el mayor beneficio.
Variables de Decisión:
X = Unidades a elaborar y vender del mueble A.
Y = Unidades a elaborar y vender del mueble B.
Z = Unidades a elaborar y vender del mueble C.
X = Unidades a elaborar y vender del mueble A.
Y = Unidades a elaborar y vender del mueble B.
Z = Unidades a elaborar y vender del mueble C.
De esta forma el modelo de
optimización que permite encontrar el plan óptimo de producción es el
siguiente:

Este es el modelo utilizado
para ejemplificar el uso de Solver de Excel en donde se pueden encontrar los
resultados.
Un modelo de programación
lineal en 2 variables resulta ser la forma más sencilla que puede adoptar un
modelo de optimización y generalmente son utilizados para introducir los
conceptos básicos de la investigación de operaciones y particularmente la
programación lineal. Básicamente las propiedas de un modelo lineal en 2
variables son extendibles a problemas lineales con un número mayor de variables
y en este sentido la resolución gráfica resulta
de gran ayuda para entender estos conceptos.
Ejemplo Resolución Gráfica
Resuelva el siguiente modelo
de programación lineal a través de la resolución gráfica.

En primera instancia se
asigna un eje a cada una de las variables de decisión, por ejemplo X1
corresponde al eje horizontal y X2 corresponde al eje vertical. Luego se
grafican las restricciones. La primera restricción intercepta el eje X1 en 3
(cuando X2=0) y el eje X2 en 6 (cuando X1=0). Dado que la restricción es del
tipo "<=" ésta determina el área que esta bajo la recta que une
las coordenadas (X1,X2)=(3,0) y (X1,X2)=(0,6). En caso de tener dudas sobre el
área que determina cada restricción se recomienda considerar un punto
cualquiera fácil de evaluar en la restricción. Por ejemplo la coordenada
(X1,X2)=(0,0) al evaluar en la restricción 1 la cumple (2*0+0<=6) y por
tanto esta coordenada será parte del dominio de dicha inecuación. De forma
similar se gráfica la segunda restricción que corta X1 en (28/7,0) y corta X2
en (0,7/2).
La intersección de los
dominios que determinan las restricciones del problema definirán el dominio de
soluciones factibles. Este dominio esta en verde en la imagen a continuación.

Una vez que ha identificado el dominio se debe buscar la
solución óptima. Una propiedad de los problemas de programación lineal es que
cuando admiten solución, ésta se encontrará siempre en un vértice del dominio
de soluciones factibles y en caso muy especiales en la frontera de dicho
dominio. Por tanto una forma de resolver será enumerando todos los vértices del
dominio y evaluando éstos en la función objetivo. En este caso como el problema
consiste en maximizar el valor de la función objetivo, el vértice que tenga un
valor mayor corresponderá a la solución óptima. En el ejemplo se disponen de 4
vértices de fácil identificación, sin embargo, esta forma de resolución
claramente queda limitada a problemas de tamaño menor.
Otra forma de resolución es a través de las curvas de nivel de
la función objetivo que corresponden en el ejemplo a rectas paralelas que
crecen en la dirección del gradiente de dicha función. Es decir, si desplazamos
la función objetivo en la dirección del vector (X1,X2)=(120,80) el valor de la
función objetivo crecerá a su mayor tasa.
En consecuencia para encontrar la solución óptima se desplazan
las curvas de nivel en la dirección del gradiente hasta que se intercepte por
última vez el dominio de puntos factibles. La linea punteada en rojo de la
imagen anterior corresponde a dicha curva de nivel y el último punto donde esta
curva intercepta el dominio corresponde al vértice con coordenadas (X1,X2)=(20/9,14/9) (Solución Óptima) con
Valor Óptimo V(P)=391,1.
EXTENSIONES: Se recomienda revisar
en detalle la resolución gráfica de modelos de Programación Lineal y su
correspondiente análisis de sensibilidad en Programación Lineal
- Resolución Gráfica.
Los modelos de Programación Entera son
aquellos donde la totalidad o un subconjunto de las variables de decisión toman
valores enteros. En este sentido la forma estandar de un modelo de Programación
Entera queda definido de la siguiente forma:

Existen múltiples
aplicaciones de modelos de Programación Entera como apoyo a la toma de
decisiones. Algunas aplicaciones típicas son problemas de localización de
instalaciones, inclusión de costos fijos, problemas de asignación, problemas de
ruteo vehicular, etc.
Modelos de Programación Entera
Problema Asignación: Una universidad está programando las clases para el
próximo semestre académico y requiere buscar la mejor asignación posible de
profesores a los distintos cursos que se deben dictar. Considere que existen 5
profesores: A, B, C, D, E y 5 cursos (asignaturas): C1, C2, C3, C4, C5.
Adicionalmente, los profesores han manifestado sus preferencias por dictar los
distintos cursos en una escala de 1 a 10, donde 10 es la máxima puntuación y 1
la mínima puntuación o preferencia. Se asume que cada profesor es apto para
dictar cualquier curso, independiente del puntaje de su preferencia. La
siguiente tabla resume las puntuaciones que asigna cada profesor a cada curso:
|
PROFESORES
|
|||||
|
CURSOS
|
A
|
B
|
C
|
D
|
E
|
|
C1
|
5
|
8
|
5
|
9
|
7
|
|
C2
|
7
|
2
|
3
|
6
|
8
|
|
C3
|
9
|
10
|
8
|
9
|
8
|
|
C4
|
8
|
7
|
9
|
7
|
8
|
|
C5
|
6
|
9
|
9
|
10
|
5
|
Se ha establecido como criterio que cada profesor
debe dictar sólo un curso y a la vez que cada curso obviamente debe tener un
profesor. En base a lo anterior se desea encontrar la asignación de profesores
que maximize el total de las preferencias.
Variables de Decisión:

Donde P(i,j) corresponde a una forma sintética de
resumir los parámetros del modelo, es decir, P(i,j) es la preferencia del
profesor i (en una escala de 1 a 10) por dictar el curso j. Por ejemplo,
P(D,C3)=9.
Restricciones:

Verifique utilizando Solver de Excel que
la solución óptima de este problema es asignar el profesor A a C3, B a C5, C a
C4, D a C1 y E a C2. Valor Óptimo = 44.
Problema Inclusión Costos Fijos: Usted
ha sido designado por el gerente de su empresa para decidir cómo distribuirá su
tráfico telefónico en el próximo mes, seleccionando entre 3 proveedores
posibles y asignando la cantidad de tráfico (minutos) que desee en cada caso,
es decir, puede repartir el tráfico en 1, 2 o 3 proveedores a su antojo y su
decisión sólo dependerá de los costos de cada alternativa.
El proveedor 1 cobra un cargo fijo mensual de US$50 y el costo
por minuto a red fija es de US$0,02 y a celular de US$0,12. El proveedor 2
tiene un cargo fijo mensual de US$60, con un costo por minuto de US$0,015 y
US$0,15 a red fija y celular respectivamente. Finalmente el proveedor 3 tiene
un cargo fijo mensual de US$40 con un costo por minuto a red fija de US$0,03 y
a celular de US$0,14. Si usted llama por uno de estos proveedores (aunque hable
sólo un minuto) deberá pagar el cargo fijo. Asuma que la cantidad de minutos
que la empresa consume mensualmente es de 30.000 para red fija y 18.000 para
celular. Formule
y resuelva un modelo de Programación Entera que permita decidir cómo distribuir
el tráfico telefónico mensual de la forma más económica para la empresa.

Un modelo de
Programación No Lineal (PNL) es aquel donde las variables de decisión se expresan como
funciones no lineales ya sea en la función objetivo y/o restricciones de un
modelo de optimización. Esta característica particular de los modelos no
lineales permite abordar problemas donde existen economías o deseconomías de
escala o en general donde los supuestos asociados a la proporcionalidad no se
cumplen.
Ejemplos de Programación No Lineal
Localización
de Instalaciones: Considere que una empresa
distribuidora de productos farmaceuticos requiere determinar la localización de
una bodega que funcionará como centro de distribución y abastecimiento para sus
locales en el país. En especial se busca estar a la menor distancia de los 3
principales locales de venta al público denominados A, B y C, respectivamente.
Las coordenadas geográficas de dichos locales se presentan en el siguiente
gráfico:

Formule y resuelva un modelo
de optimización que permita determinar la localización óptima de la bodega y
que minimize la distancia a los distintos locales de la empresa. Asuma que la
bodega puede ser ubicada en cualquier coordenada o punto del mapa.
Respuesta: Si
consideramos como variables de decisión X e Y que correspondan a las
respectivas coordenadas de la bodega a instalar, se puede definir el siguiente
modelo de optimización no lineal sin restricciones, donde la siguiente función
objetivo de minimización de distancia (Min
f(x,y)) queda definido por:
Se recomienda resolver este
problema utilizando Solver de Excel y verificar que
la solución óptima corresponde a X=33,45 e Y=40,88.
Método del Gradiente
Un modelo de Programación
Lineal (PNL) es aquel donde las variables de decisión se expresan como
funciones no lineales ya sea en la función objetivo y/o restricciones de un
modelo de optimización. Esta característica particular de los modelos no
lineales permite abordar problemas donde existen economías o deseconomías de
escala o en general donde los supuestos asociados a la proporcionalidad no se
cumplen.
En este sentido el método del
gradiente (conocido también como método de Cauchy o del descenso más
pronunciado) consiste en un algortimo específico para la resolución de modelos
de PNL sin restricciones, perteneciente a la categoría de algoritmos generales
de descenso, donde la búsqueda de un mínimo está asociado a la resolución
secuencial de una serie de problemas unidimensionales.
Los pasos asociados a la
utilización del método del gradiente o descenso más pronunciado consiste en:
Un proceso estocástico en
tiempo discreto es una Cadena de Markov en
la medida que se verifiquen las siguientes propiedades:
Propiedad Markoviana:

Donde i0, i1, ..., in-1, i, j
son posibles “ estados” o valores que puede tomar el proceso estocástico en las
distintas etapas. Esto consiste básicamente en afirmar que el futuro (t=n+1) es
independiente del pasado dado el presente (t=n).
Propiedad Estacionaria: La
probabilidad

No depende de la etapa n. Por
ejemplo, la probabilidad de pasar del estado i al estado j será siempre la
misma no importando el número de la etapa.
Si consideramos que la
variable aleatoria asociado a este proceso markoviano toma un número finito de
estados (digamos M) las probabilidades de transición de un estado a otro se
pueden resumir en una matriz P denominada
matriz de transición de probabilidades en una etapa. Adicionalmente si
conocemos la distribución de probabilidad para la etapa inicial (que denotamos
por f0)
estamos en condiciones de conocer el proceso estocástico, que consiste en
determinar la distribución de probabilidad en cada etapa.

Ejemplo Cadena de Markov en Tiempo Discreto
Suponga que en un juego existen 2 jugadores, cada
uno de los cuales dispone inicialmente de 2 monedas. En cada jugada se gana una
moneda con probabilidad ½ o se pierde una moneda con probabilidad ½. El juego
termina cuando un jugador tiene 4 monedas o se queda con ninguna. Modele como
una Cadena de Markov la situación descrita.
Desarrollo: El primer caso consiste en identificar la
variable aleatoria la cuál debe representar el problema planteado, en este caso
la evolución del juego al cabo de cada etapa o jugada. Se define la variable
aleatoria en tiempo discreto Xn : Cantidad de monedas que
tiene uno de los jugadores (digamos el jugador A) al cabo de la enésima jugada.
Luego
se debe identificar los posibles valores o estados que puede tomar esta
variable aleatoria para una etapa n cualquiera. Sabemos que el jugador A
comienza el juego con 2 monedas y el juego termina cuando pierde todo (y por
tanto el jugador B gana) o cuando gana todo (y por tanto el jugador B pierde).
En consecuencia, los valores posibles para Xn son {0,1,2,3,4}.
A
continuación se debe determinar las probabilidades de transición (en una
etapa). Por ejemplo, si actualmente el jugador A tiene 2 monedas, la
probabilidad que tenga 3 monedas al cabo de una jugada es ½ (probabilidad de
ganar) y la probabilidad de que tenga 1 moneda es ½ (probabilidad de perder).
De esta forma se identifican las distintas combinaciones o probabilidades de
que comenzando en un estado "i" se pueda pasar a un estado
"j" al cabo de una etapa. Notar que si el jugador A tiene 0 monedas
la probabilidad que continue en ese estado es 1 (o 100%) dado que no tiene
monedas para seguir jugando. De la misma forma si el jugador A tiene 4 monedas
el jugador B tiene 0 y por tanto la probabilidad de que el jugador A se
mantenga en ese estado es de 1 (o 100%).
Las
probabilidades de transición en una etapa se pueden representar haciendo uso de
un grafo o en forma resumida a través de la matriz de transición de
probabilidades.
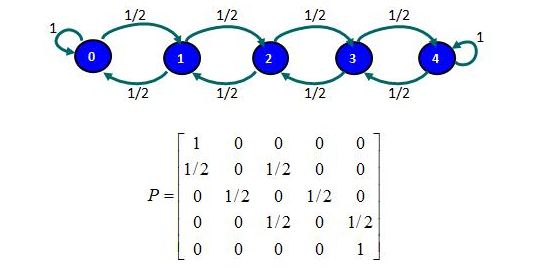
Cabe
destacar que la suma de las probabilidades para cada fila en la matriz de
transición P es de un 100%.
Podemos
responder preguntas adicionales cómo por ejemplo ¿Cuál es la probabilidad de
que el jugador A tenga 2 monedas al cabo de 2 jugadas?
Haciendo
uso del grafo y dado que actualmente el jugador A tiene 2 monedas, se busca
identificar las combinaciones que permitan a este jugador mantener esta cantidad
de monedas al cabo de 2 etapas. Esto se logra ganando la próxima jugada (con
probabilidad ½) y perdiendo la jugada que sigue (con probabilidad ½). También
se llega al mismo resultado perdiendo la próxima jugada pero luego ganando en
la jugada que sigue. Por tanto la probabilidad de tener 2 monedas al cabo de 2
etapas es P(X2=2/X0=2) = ½*½ + ½*½ = ½.

Un modelo de Programación No Lineal (PNL) es
aquel donde las variables de decisión se expresan como funciones no lineales ya
sea en la función objetivo y/o restricciones de un modelo de optimización. Esta
característica particular de los modelos no lineales permite abordar problemas
donde existen economías o deseconomías de escala o en general donde los
supuestos asociados a la proporcionalidad no se cumplen.
Las condiciones que
establecen las condiciones de optimalidad de KKT permiten resolver modelos de
PNL con restricciones mediante la activación progresivas de las restricciones
del modelo. Una restricción activa es aquella que se cumple en igualdad.
Ejemplo Karush Kuhn Tucker (KKT)
No existe una única forma de
abordar la resolución de un problema de programación no lineal utilizando el
teorema de KKT. Consideraremos la aplicación de este teorema en este caso para
problemas sólo con
restricciones "<=" (menor o igual). Si el problema tiene
restricciones ">=" éstas se pueden transformar por
"<=" multiplicando por -1.
Básicamente el procedimiento
consiste en resolver el problema no lineal como uno sin restricciones, luego si
la solución óptima de dicho problema no cumple la totalidad o parte de las
restricciones del problema se activan dichas restricciones (en conjunto y/o
secuencialmente) y se resuelve nuevamente. Esto se repite hasta llegar a un
conjunto de restricciones activas cuya solución también satisface las
restricciones omitidas. Notar que si se han activado la totalidad de
restricciones sin encontrar una solución factible, entonces el problema es
infactible.
EJEMPLO: Considere
el siguiente problema de programación no lineal restringida. Utilizando
las condiciones de optimalidad de KKT encuentre
la solución óptima de dicho problema.
Problema Inclusión Costos Fijos: Usted
ha sido designado por el gerente de su empresa para decidir cómo distribuirá su
tráfico telefónico en el próximo mes, seleccionando entre 3 proveedores
posibles y asignando la cantidad de tráfico (minutos) que desee en cada caso,
es decir, puede repartir el tráfico en 1, 2 o 3 proveedores a su antojo y su
decisión sólo dependerá de los costos de cada alternativa.
El proveedor 1 cobra un cargo fijo mensual de US$50 y el costo
por minuto a red fija es de US$0,02 y a celular de US$0,12. El proveedor 2
tiene un cargo fijo mensual de US$60, con un costo por minuto de US$0,015 y
US$0,15 a red fija y celular respectivamente. Finalmente el proveedor 3 tiene
un cargo fijo mensual de US$40 con un costo por minuto a red fija de US$0,03 y
a celular de US$0,14. Si usted llama por uno de estos proveedores (aunque hable
sólo un minuto) deberá pagar el cargo fijo. Asuma que la cantidad de minutos
que la empresa consume mensualmente es de 30.000 para red fija y 18.000 para
celular. Formule
y resuelva un modelo de Programación Entera que permita decidir cómo distribuir
el tráfico telefónico mensual de la forma más económica para la empresa.
Un modelo de
Programación No Lineal (PNL) es aquel donde las variables de decisión se expresan como
funciones no lineales ya sea en la función objetivo y/o restricciones de un
modelo de optimización. Esta característica particular de los modelos no
lineales permite abordar problemas donde existen economías o deseconomías de
escala o en general donde los supuestos asociados a la proporcionalidad no se
cumplen.
Ejemplos de Programación No Lineal
Localización
de Instalaciones: Considere que una empresa
distribuidora de productos farmaceuticos requiere determinar la localización de
una bodega que funcionará como centro de distribución y abastecimiento para sus
locales en el país. En especial se busca estar a la menor distancia de los 3
principales locales de venta al público denominados A, B y C, respectivamente.
Las coordenadas geográficas de dichos locales se presentan en el siguiente
gráfico:
Formule y resuelva un modelo
de optimización que permita determinar la localización óptima de la bodega y
que minimize la distancia a los distintos locales de la empresa. Asuma que la
bodega puede ser ubicada en cualquier coordenada o punto del mapa.
Respuesta: Si
consideramos como variables de decisión X e Y que correspondan a las
respectivas coordenadas de la bodega a instalar, se puede definir el siguiente
modelo de optimización no lineal sin restricciones, donde la siguiente función
objetivo de minimización de distancia (Min
f(x,y)) queda definido por:
Se recomienda resolver este
problema utilizando Solver de Excel y verificar que la solución
óptima corresponde a X=33,45 e Y=40,88.
Método del Gradiente
Un modelo de Programación
Lineal (PNL) es aquel donde las variables de decisión se expresan como
funciones no lineales ya sea en la función objetivo y/o restricciones de un
modelo de optimización. Esta característica particular de los modelos no
lineales permite abordar problemas donde existen economías o deseconomías de
escala o en general donde los supuestos asociados a la proporcionalidad no se
cumplen.
En este sentido el método del
gradiente (conocido también como método de Cauchy o del descenso más
pronunciado) consiste en un algortimo específico para la resolución de modelos
de PNL sin restricciones, perteneciente a la categoría de algoritmos generales
de descenso, donde la búsqueda de un mínimo está asociado a la resolución
secuencial de una serie de problemas unidimensionales.
Los pasos asociados a la
utilización del método del gradiente o descenso más pronunciado consiste en:
Un proceso estocástico en
tiempo discreto es una Cadena de Markov en
la medida que se verifiquen las siguientes propiedades:
Propiedad Markoviana:
Donde i0, i1, ..., in-1, i, j
son posibles “ estados” o valores que puede tomar el proceso estocástico en las
distintas etapas. Esto consiste básicamente en afirmar que el futuro (t=n+1) es
independiente del pasado dado el presente (t=n).
Propiedad Estacionaria: La
probabilidad
No depende de la etapa n. Por
ejemplo, la probabilidad de pasar del estado i al estado j será siempre la
misma no importando el número de la etapa.
Si consideramos que la
variable aleatoria asociado a este proceso markoviano toma un número finito de
estados (digamos M) las probabilidades de transición de un estado a otro se
pueden resumir en una matriz P denominada
matriz de transición de probabilidades en una etapa. Adicionalmente si
conocemos la distribución de probabilidad para la etapa inicial (que denotamos
por f0)
estamos en condiciones de conocer el proceso estocástico, que consiste en
determinar la distribución de probabilidad en cada etapa.
Ejemplo Cadena de Markov en Tiempo Discreto
Suponga que en un juego existen 2 jugadores, cada
uno de los cuales dispone inicialmente de 2 monedas. En cada jugada se gana una
moneda con probabilidad ½ o se pierde una moneda con probabilidad ½. El juego
termina cuando un jugador tiene 4 monedas o se queda con ninguna. Modele como
una Cadena de Markov la situación descrita.
Desarrollo: El primer caso consiste en identificar la
variable aleatoria la cuál debe representar el problema planteado, en este caso
la evolución del juego al cabo de cada etapa o jugada. Se define la variable
aleatoria en tiempo discreto Xn : Cantidad de monedas que
tiene uno de los jugadores (digamos el jugador A) al cabo de la enésima jugada.
Luego
se debe identificar los posibles valores o estados que puede tomar esta
variable aleatoria para una etapa n cualquiera. Sabemos que el jugador A
comienza el juego con 2 monedas y el juego termina cuando pierde todo (y por
tanto el jugador B gana) o cuando gana todo (y por tanto el jugador B pierde).
En consecuencia, los valores posibles para Xn son {0,1,2,3,4}.
A
continuación se debe determinar las probabilidades de transición (en una
etapa). Por ejemplo, si actualmente el jugador A tiene 2 monedas, la
probabilidad que tenga 3 monedas al cabo de una jugada es ½ (probabilidad de
ganar) y la probabilidad de que tenga 1 moneda es ½ (probabilidad de perder).
De esta forma se identifican las distintas combinaciones o probabilidades de
que comenzando en un estado "i" se pueda pasar a un estado
"j" al cabo de una etapa. Notar que si el jugador A tiene 0 monedas
la probabilidad que continue en ese estado es 1 (o 100%) dado que no tiene
monedas para seguir jugando. De la misma forma si el jugador A tiene 4 monedas
el jugador B tiene 0 y por tanto la probabilidad de que el jugador A se
mantenga en ese estado es de 1 (o 100%).
Las
probabilidades de transición en una etapa se pueden representar haciendo uso de
un grafo o en forma resumida a través de la matriz de transición de
probabilidades.
Cabe
destacar que la suma de las probabilidades para cada fila en la matriz de
transición P es de un 100%.
Podemos
responder preguntas adicionales cómo por ejemplo ¿Cuál es la probabilidad de
que el jugador A tenga 2 monedas al cabo de 2 jugadas?
Haciendo
uso del grafo y dado que actualmente el jugador A tiene 2 monedas, se busca
identificar las combinaciones que permitan a este jugador mantener esta cantidad
de monedas al cabo de 2 etapas. Esto se logra ganando la próxima jugada (con
probabilidad ½) y perdiendo la jugada que sigue (con probabilidad ½). También
se llega al mismo resultado perdiendo la próxima jugada pero luego ganando en
la jugada que sigue. Por tanto la probabilidad de tener 2 monedas al cabo de 2
etapas es P(X2=2/X0=2) = ½*½ + ½*½ = ½.
Un modelo de Programación No Lineal (PNL) es
aquel donde las variables de decisión se expresan como funciones no lineales ya
sea en la función objetivo y/o restricciones de un modelo de optimización. Esta
característica particular de los modelos no lineales permite abordar problemas
donde existen economías o deseconomías de escala o en general donde los
supuestos asociados a la proporcionalidad no se cumplen.
Las condiciones que
establecen las condiciones de optimalidad de KKT permiten resolver modelos de
PNL con restricciones mediante la activación progresivas de las restricciones
del modelo. Una restricción activa es aquella que se cumple en igualdad.
Ejemplo Karush Kuhn Tucker (KKT)
No existe una única forma de
abordar la resolución de un problema de programación no lineal utilizando el
teorema de KKT. Consideraremos la aplicación de este teorema en este caso para
problemas sólo con
restricciones "<=" (menor o igual). Si el problema tiene
restricciones ">=" éstas se pueden transformar por
"<=" multiplicando por -1.
Básicamente el procedimiento
consiste en resolver el problema no lineal como uno sin restricciones, luego si
la solución óptima de dicho problema no cumple la totalidad o parte de las
restricciones del problema se activan dichas restricciones (en conjunto y/o
secuencialmente) y se resuelve nuevamente. Esto se repite hasta llegar a un
conjunto de restricciones activas cuya solución también satisface las
restricciones omitidas. Notar que si se han activado la totalidad de
restricciones sin encontrar una solución factible, entonces el problema es
infactible.
EJEMPLO: Considere
el siguiente problema de programación no lineal restringida. Utilizando
las condiciones de optimalidad de KKT encuentre
la solución óptima de dicho problema.

El método de Branch and Bound (en
español Ramificación y Acotamiento) aborda la resolución de modelos de
programación entera a través de la resolución de una secuencia de modelos de
programación lineal que consituirán los nodos o subproblemas del problema
entero. Si bien el procedimiento es extendible a un número mayor de variables,
para efectos prácticos ilustraremos su aplicación para modelos de programación
entera en 2 variables.
Ejemplo Branch and Bound
Resuelva el siguiente modelo
de programación entera a través del algoritmo de ramificación y acotamiento (Branch and Bound)

El primer paso consiste en
resolver el problema sin considerar las condiciones de integralidad, es decir,
asumiendo que es un modelo de Programación Lineal. El siguiente gráfico muestra
la resolución gráfica donde el área en verde corresponde al dominio de
soluciones factibles asociado al problema lineal lo que se denomina la
relajación continua del problema entero. Adicionalmente, sólo con el objetivo
de ilustrar se han marcado con azul las posibles soluciones enteras para este
problema. En este sentido resulta evidente que el dominio de soluciones
factibles del problema entero es un subconjunto del dominio del problema lineal
y esto en el caso de un problema de maximización determina que el valor óptimo
del problema lineal será una cota superior del valor óptimo del problema
entero.
Comentarios
Publicar un comentario